Comment elle nous parle.
Quantique ?

Bon, après retour au stand et analyse des télémesures embarquées (*) nous pouvons affirmer avec certitude que le programme de capture est blanchi !

(#)
Ah! mais. Quand à ma conduite, elle a été irréprochable là.

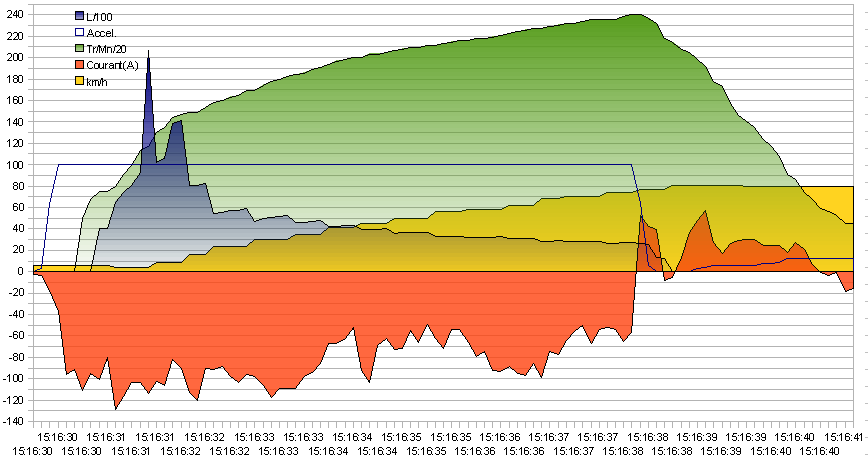
C'est cette fainéante de Prius qui se permet de fournir la vitesse actualisée seulement 2 fois par seconde.

Elle envoie 4 à 5 fois la même valeur puis 1/2 seconde plus tard on saute brutalement à en général 5à8 km/h plus haut. Rien que ça.

La vitesse croît d'en moyenne 12 km/h/s
au début. Cela fait une accélération de 12*0,277777=
3,33 m/s²
Cette info vitesse est issue de la vitesse de rotation des 4 roues.
Ces 4 infos circulent sur le Bus CAN.
Après étude je constate que celles-là sont actualisées nettement plus souvent puisque
rien qu'en lisant la vitesse des 2 roues Av on aurait une vitesse qui augmente par palier d'1/2 unité.

Pour résumer cet essai en très bref:

-
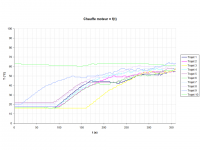
la vitesse du thermique n'est pas du tout maxi dès le début !!
-il y a même un plateau vers 1500 tr/mn (le vvti ?)
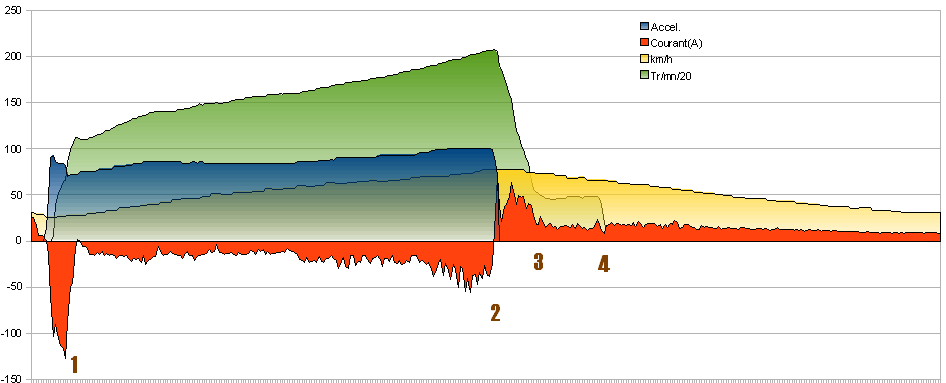
-Le moteur électrique (MG2) bosse beaucoup, surtout si on compare à l'exemple précédent qui était parti de 25 km/h pour finir à 77 km/h mais sans accélérer à fond dès le début. (ce sont les mêmes échelles et couleurs)
A+

(*) En effet le flux complet d'infos circulant sur le Bus est capturé. Il "suffit" de l'étudier tranquillement après.
Ici pendant les 11 secondes il y a eu plus de 20000 "paquets d'infos" sur le bus CAN.
Une vraie Pie cette Prius.
(#) Et c'est de la bonne, capture bien sûr.





{kind=link}