FWD2009
Junior
- Inscrit
- 17 Juil. 2009
- messages
- 10
- Score de réaction
- 0
- Localisation
- Dutch ( english writing here )
- Véhicule
- 2005
anyone already got the gen 3 prius and did a tryout with the PCM software?
did it work?
did it work?
Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.
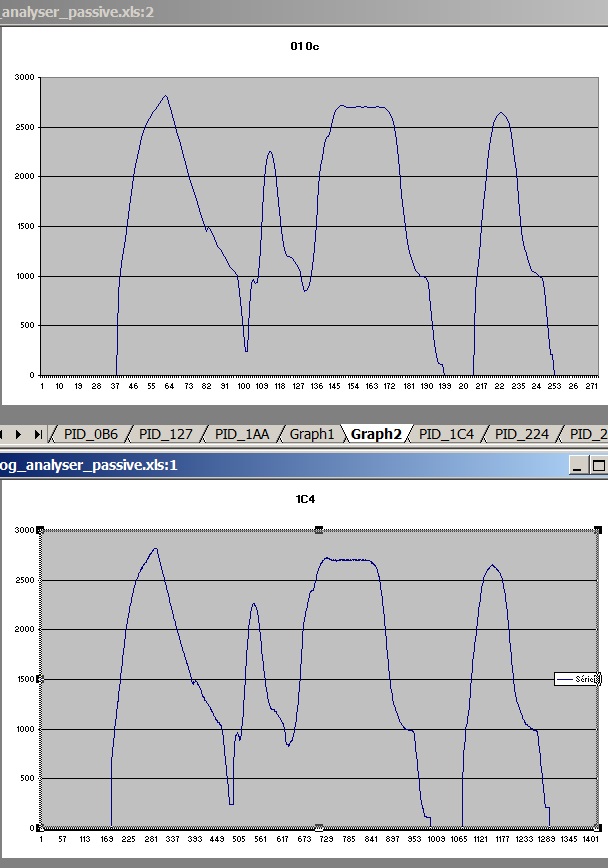
v_ICE = can_uint16(v1C4,0)
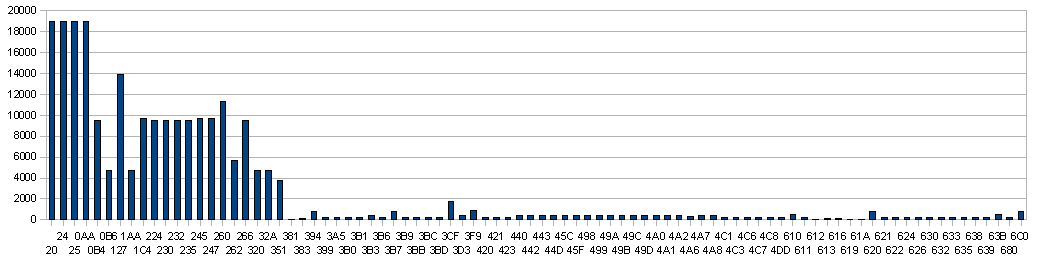
Sur un log de Priusfan, j'observe des vitesses moteur plutôt élevées, mais jamais plus de 5150. Un ralenti de chauffe à 1600, un entrainement à plus de 70 km/h valeur 1280.
Pour étalonner en observant le plateau du régime moteur maximal 5200 t/min, il faudrait faire un test 0..100 km/h accélérateur à fond.
Oui, lorsque je suis en pilotage automatique, mes doigts ne connaissent que la P2Tu veux dire P3, non ?
v_ICE = can_uint16(v1C4,0)
Sur un log de Priusfan, j'observe des vitesses moteur plutôt élevées, mais jamais plus de 5150. Un ralenti de chauffe à 1600, un entrainement à plus de 70 km/h valeur 1280...
Dans la seconde qui suit l'arrêt, il s'est mis à pencher sur la droite. Le bas-côté s'est-il effondré ? On voit une succession de 5 poussées avec une période de 3 ou 4 secondes
