Palm35
Participant hyperactif
- Inscrit
- 18 Nov. 2005
- messages
- 2,548
- Score de réaction
- 755
- Localisation
- Rennes
- Véhicule
- Sol Pack IPA 2006, Kangoo Electri'cité, C-Zéro
hello,
maintenant que le forum dispose d'informaticiens maitrisant bien les différents languages et la Prius, il serait intéressant de développer un Tripmaster pouvant servir par exemple aux rallyes de régularité type RMCVEA.
aux rallyes de régularité type RMCVEA.
Ce projet/logiciel comprend (pour moi) de base au minimum 2 fonctions:
-1°) étalonnage et/ou vérification
-2) tripmaster
Voici un début de cahier des charges:
point 1: étalonnage
On part d'un point A pour arriver à un point B et cette distance a été mesurée par les commissaires de courses.
C'est cette distance qui fera référence pour la vitesse de référence.
Attention, dans certains rallyes (italiens par ex) cette distance peut être différente de la vraie valeur.
C'est à dire que 1000m réels peuvent faire 1200m dans le rallye.
C'est pourquoi cet écran d'étalonnage est important
Il faut dans cet écran:
-un bouton départ point A
-un bouton arrivée point B
-la distance parcourue calculée par la Prius et ses capteurs de roues en mètre ou kilometre et si c'est en kilometre avec 2 décimales: la précision sera donc de 1m ou 10m
-la distance réelle donnée par la direction de course
ensuite un bouton permettant d'ajuster la distance parcourue par rapport à la distance officielle.
Cet ajustement peut être en % en plus ou en moins par rapport à la distance.
Ce coefficient "correcteur" servira dans le calcul du prochain écran
point 2: tripmaster
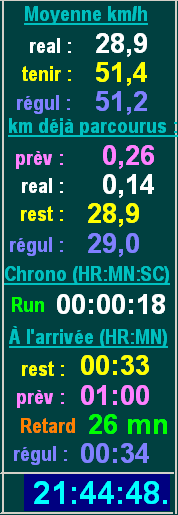
je posséde un petit program Palm qui n'est pas parfait mais qui donne une idée de ce que devrait afficher le programme:

il faut dans cet écran:
-la vitesse de régularité imposée par le Rallye (que l'on peut programmer/entrer)
-un bouton départ/arrivée et intermédiaire qui peut être dédié à une touche de clavier
-la distance parcourue
-la vitesse moyenne de la Prius depuis le début de la Zone de Régulation
-le chrono indiquant le temps écoulé depuis le départ de la ZR
-la vitesse actuelle
- un affichage 'GAP' en minutes-secondes-centièmes qui est la différence entre le temps idéal par rapport à la vitesse imposée et chrono réel depuis que vous roulez
Sur cette copie d'écran, on voit qu'on est 'pile poil' à 28 centièmes près !
le moins -00:00.28 indiquant d'aller moins vite. Ma position est la voiture rouge qui est devant la grise, quand on est OK les 2 voitures doivent être superposées
-un affichage 'GAP' en métres précédé d'un signe moins ou plus (moins vite ou plus vite) indiquant la différence entre la distane idéale de la moyenne imposée et votre distance effectuée.
Ainsi, avec ces deux 'GAP' on peut parler en secondes ou en mètres
On peut/pourra ensuite ajouter d'autres fonctions comme l'enregistrement des données ou autres ...
La précision donnée par les capteurs de roues est meilleure que la précision du compteur kilométique de la Prius.
Je crois savoir que lors de l'étalonnage, Mik&Toy était exactement à la valeur donnée par le Rallye
Voila mes premières idées......
maintenant que le forum dispose d'informaticiens maitrisant bien les différents languages et la Prius, il serait intéressant de développer un Tripmaster pouvant servir par exemple
aux rallyes de régularité type RMCVEA.Ce projet/logiciel comprend (pour moi) de base au minimum 2 fonctions:
-1°) étalonnage et/ou vérification
-2) tripmaster
Voici un début de cahier des charges:
point 1: étalonnage
On part d'un point A pour arriver à un point B et cette distance a été mesurée par les commissaires de courses.
C'est cette distance qui fera référence pour la vitesse de référence.
Attention, dans certains rallyes (italiens par ex) cette distance peut être différente de la vraie valeur.
C'est à dire que 1000m réels peuvent faire 1200m dans le rallye.
C'est pourquoi cet écran d'étalonnage est important
Il faut dans cet écran:
-un bouton départ point A
-un bouton arrivée point B
-la distance parcourue calculée par la Prius et ses capteurs de roues en mètre ou kilometre et si c'est en kilometre avec 2 décimales: la précision sera donc de 1m ou 10m
-la distance réelle donnée par la direction de course
ensuite un bouton permettant d'ajuster la distance parcourue par rapport à la distance officielle.
Cet ajustement peut être en % en plus ou en moins par rapport à la distance.
Ce coefficient "correcteur" servira dans le calcul du prochain écran
point 2: tripmaster
je posséde un petit program Palm qui n'est pas parfait mais qui donne une idée de ce que devrait afficher le programme:
il faut dans cet écran:
-la vitesse de régularité imposée par le Rallye (que l'on peut programmer/entrer)
-un bouton départ/arrivée et intermédiaire qui peut être dédié à une touche de clavier
-la distance parcourue
-la vitesse moyenne de la Prius depuis le début de la Zone de Régulation
-le chrono indiquant le temps écoulé depuis le départ de la ZR
-la vitesse actuelle
- un affichage 'GAP' en minutes-secondes-centièmes qui est la différence entre le temps idéal par rapport à la vitesse imposée et chrono réel depuis que vous roulez
Sur cette copie d'écran, on voit qu'on est 'pile poil' à 28 centièmes près !
le moins -00:00.28 indiquant d'aller moins vite. Ma position est la voiture rouge qui est devant la grise, quand on est OK les 2 voitures doivent être superposées
-un affichage 'GAP' en métres précédé d'un signe moins ou plus (moins vite ou plus vite) indiquant la différence entre la distane idéale de la moyenne imposée et votre distance effectuée.
Ainsi, avec ces deux 'GAP' on peut parler en secondes ou en mètres
On peut/pourra ensuite ajouter d'autres fonctions comme l'enregistrement des données ou autres ...
La précision donnée par les capteurs de roues est meilleure que la précision du compteur kilométique de la Prius.
Je crois savoir que lors de l'étalonnage, Mik&Toy était exactement à la valeur donnée par le Rallye
Voila mes premières idées......