Mik&Toy
Participant hyperactif
- Inscrit
- 9 Juil. 2007
- messages
- 1,926
- Score de réaction
- 3
- Véhicule
- autre
Quelques infos glanées au fil de mes lectures (studieuses !) et quelques interrogations :
1/
2/
De plus, il doit y avoir une incidence notable du paramètre "VVT-i" (0x39-2) sur la conso, que je ne trouve explicitée nulle part, bien que tout monde vante les économies de carburant réalisées par ce moyen !
3/
1/
Le message "S6" doit onc être envoyé à chaque initialisation pour assurer un débit correct, je suppose. Est-ce le cas pour toutes les applis CAN ?Communications with CAN232 via a terminal application:
send "V" command. You'll see "V1220" version info received.
send "N" command. You'll see "NB743" serial number.
send "X1" command to enable AutoPoll function.
send "S6" command to set 500 kbps CAN speed.
send "O" command to open the CAN port. You'll see a lot of CAN messages.
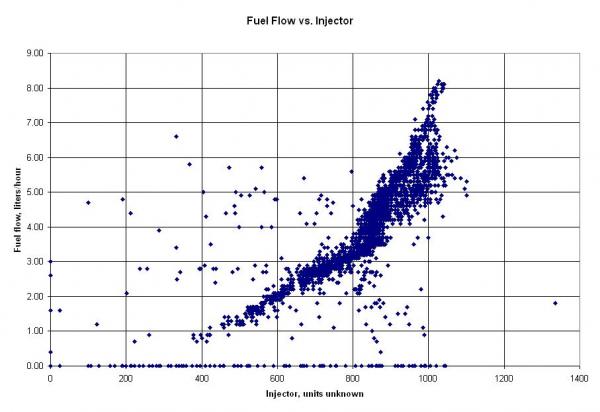
2/
Ce qui fournirait l'étalonnage de la donnée "injector timing", mais ne serait pas lié au régime moteur. Étrange !.ICE (Internal Combustion Engine) power is calculated as prescribed by Norm Dick, the inventor of CAN-View, ascribing 58 kW to 238 in the CAN output for fuel flow and assuming linearity..
De plus, il doit y avoir une incidence notable du paramètre "VVT-i" (0x39-2) sur la conso, que je ne trouve explicitée nulle part, bien que tout monde vante les économies de carburant réalisées par ce moyen !
3/
Ce qui expliquerait les bidouillages possibles pour les plug-in amateur.Altering the SOC (SOC spoofing)
The OEM battery broadcasts a message on the CAN bus approximately every 100ms which includes the SOC. It has been discovered that the Prius's HV ECU listens to the last message received. Simply rebroadcasting that message immediately after it was originally sent with an altered value for the SOC (and altered checksum), causes the car to believe that the SOC is the altered value without intercepting the original message. This allows a conversion to spoof the SOC in a low cost and simple method which does not require altering the OEM battery's ECU or taps. The agent doing the rebroadcasting can be a computer with a device such as CANUSB or a small embedded system with a CAN interface.
Any system which uses SOC spoofing must be careful not to over discharge or overcharge the OEM battery