eeepc
bonjour
ce message est en provenance de mon nouveau joujou : un eeepc
aprés avoir vu celui de alexb, j'ai craqué et m'en suis offert un.
j'ai remplacé la barette de ram (512 mO par une de de 2 gigas (49€).
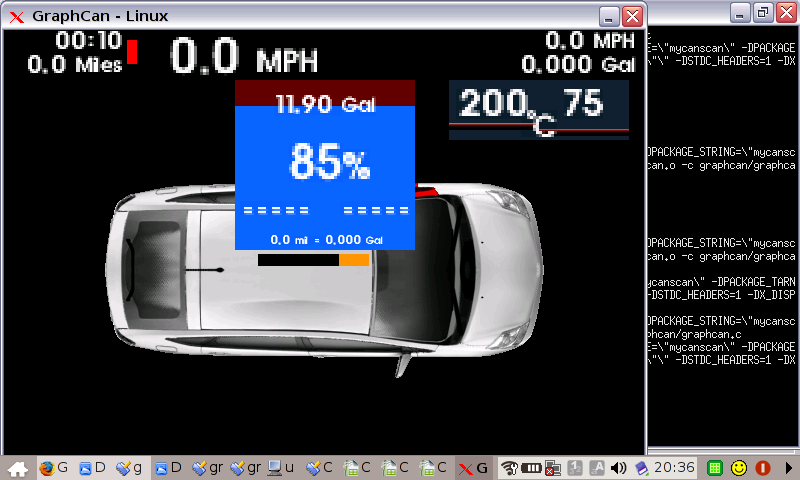
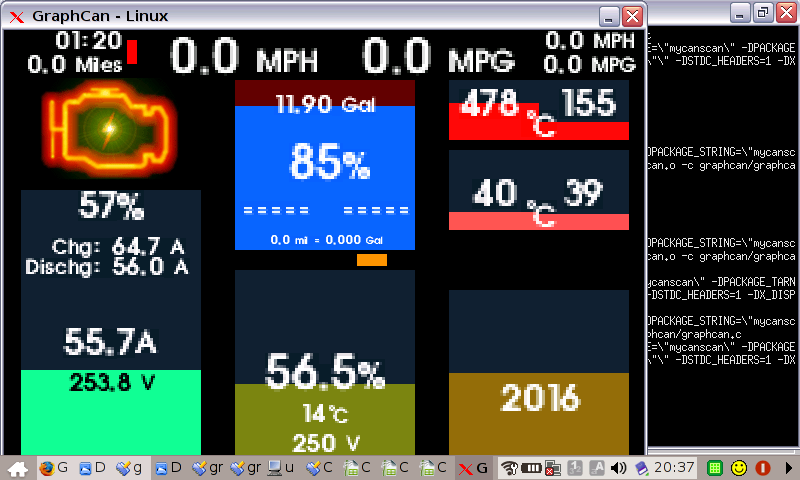
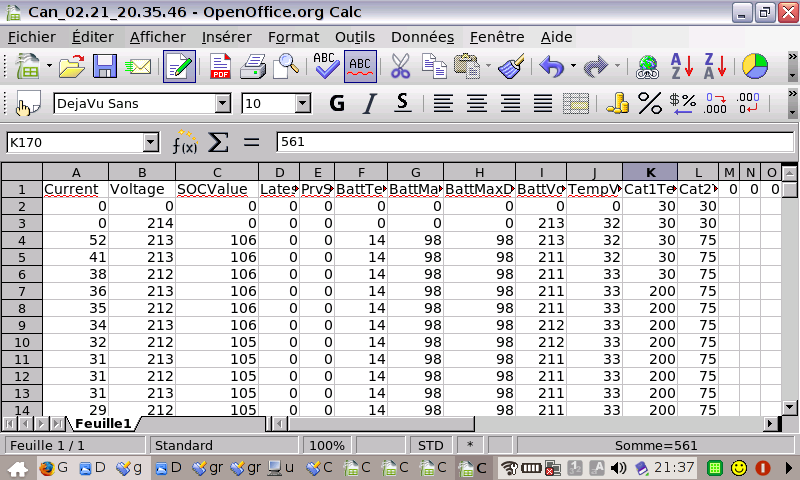
j'ai l'intention de porter toute l'appli de Attila VASS sur cette machine.
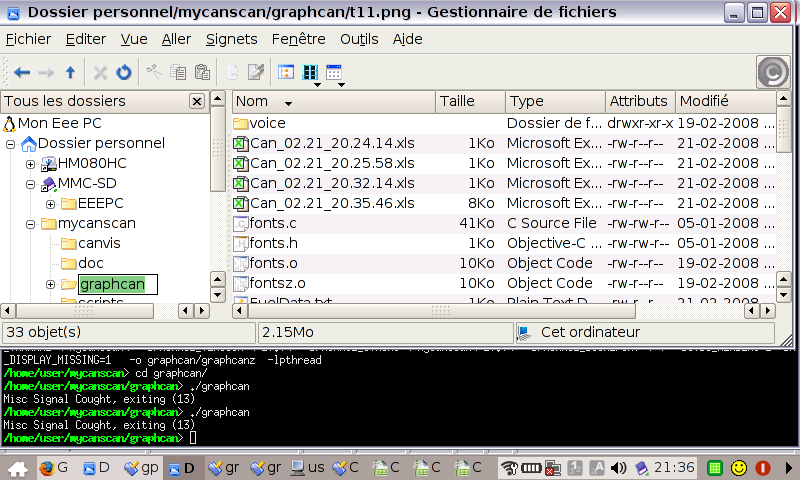
j'ai donc récupéré sur son site tous les sources.
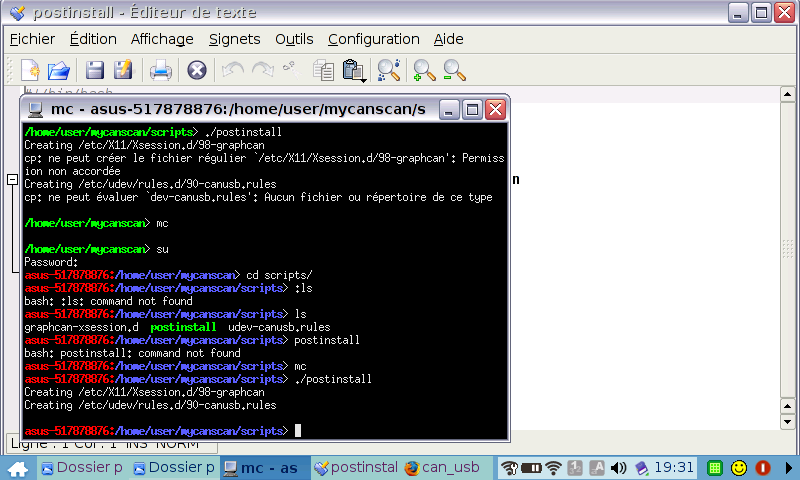
la première étape a été d'installer les "libraries" nécessaires afin de pouvoir compiler :

bien sur rien ne marche encore
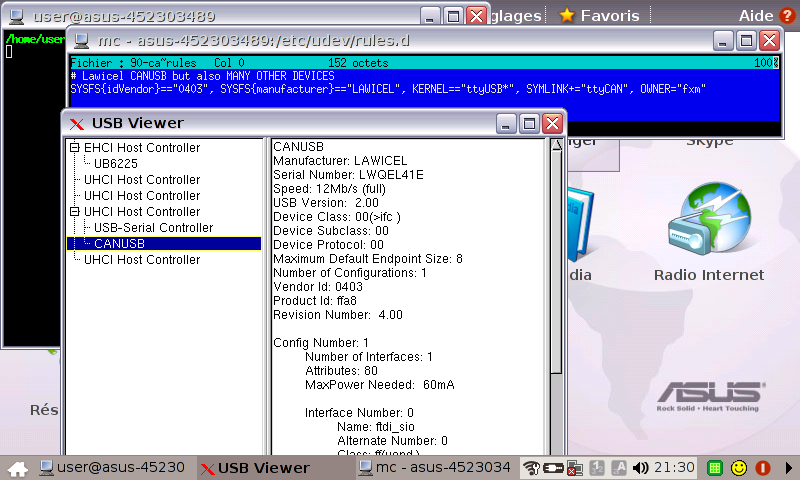
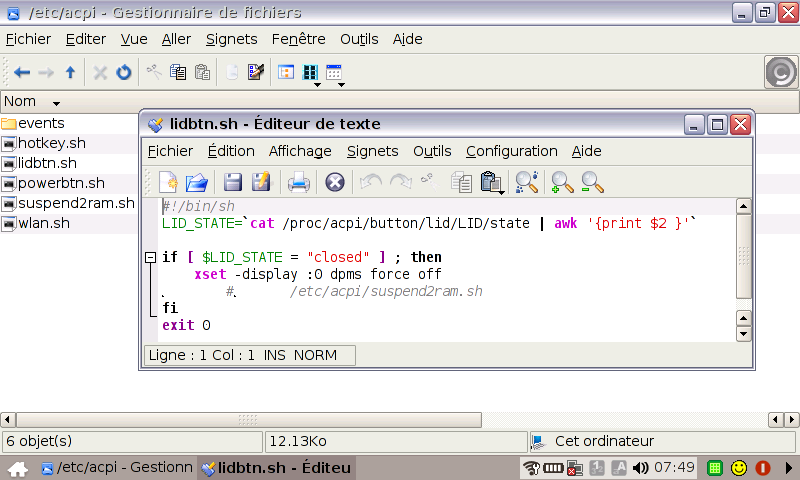
car il faut personnaliser la résolution d'écran et la gestion du port USB
accessoirement") , il est nécessaire d'utiliser le convertisseur canusb de lawicell dispo chez lextronic : http://www.lextronic.fr/P466-module-canusb.html
, il est nécessaire d'utiliser le convertisseur canusb de lawicell dispo chez lextronic : http://www.lextronic.fr/P466-module-canusb.html
j'ai également installé gpsd (un démon GPS) qui sera connecté à mon inforad afin de logger simultanément les coordonnées de la watture.
à suivre ......
bonjour
ce message est en provenance de mon nouveau joujou : un eeepc
aprés avoir vu celui de alexb, j'ai craqué et m'en suis offert un.
j'ai remplacé la barette de ram (512 mO par une de de 2 gigas (49€).
j'ai l'intention de porter toute l'appli de Attila VASS sur cette machine.
j'ai donc récupéré sur son site tous les sources.
la première étape a été d'installer les "libraries" nécessaires afin de pouvoir compiler :
- maj de /etc/apt/sources.list:
Code:
deb [URL]http://update.eeepc.asus.com/p701[/URL] p701 main deb [URL]http://update.eeepc.asus.com/p701/fr-channel[/URL] p701 main deb [URL]ftp://ftp.fr.debian.org/debian/[/URL] stable main contrib non-free deb [URL]http://xnv4.xandros.com/xs2.0/upkg-srv2[/URL] etch main contrib non-free deb [URL]http://dccamirror.xandros.com/dccri/[/URL] dccri-3.0 main deb [URL]http://www.geekconnection.org/[/URL] xandros4 main [SIZE=2]deb [URL]http://download.tuxfamily.org/eeepcrepos/[/URL] p701 main etch[/SIZE] - apt-get update
- apt-get install build-essential
- apt-get install libx11-dev
- apt-get installlibpng12-dev
bien sur rien ne marche encore
car il faut personnaliser la résolution d'écran et la gestion du port USB
accessoirement
j'ai également installé gpsd (un démon GPS) qui sera connecté à mon inforad afin de logger simultanément les coordonnées de la watture.
à suivre ......
")