Bonjour,
je me lance dans un nouveau projet basé sur Arduino & STN1110.
j'ai déja un arduino qui traine à la maison,(et je sais bricoler dessus)
j'ai contacté un gars qui a développé un shield stn1110
mon idée est de solliciter, collecter et traiter localement les données pour envoyer uniquement la synthèse en BT (cette idée me trotte dans la tête depuis un moment et rejoint la remarque de planétaire afin de bypasser les limites du BT).
intérêt du système: meilleur débit, utilisable toutes plateformes...
@suivre
edit: changement de fusil d'épaule.
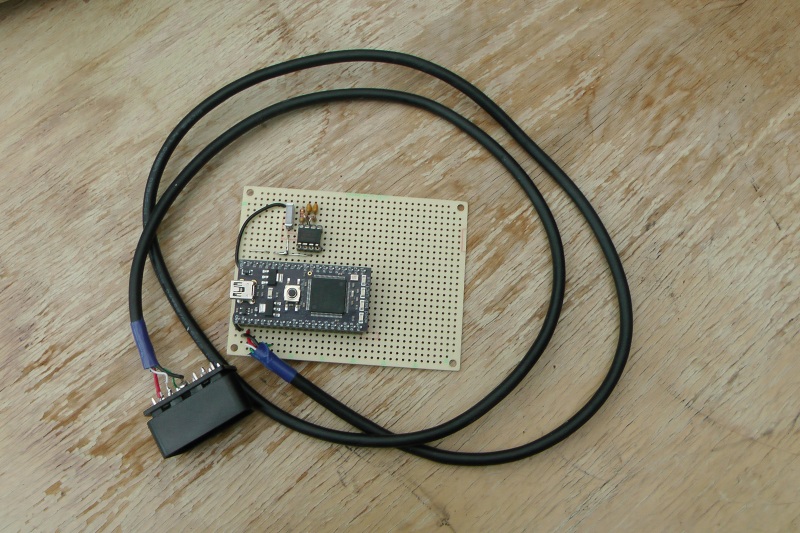
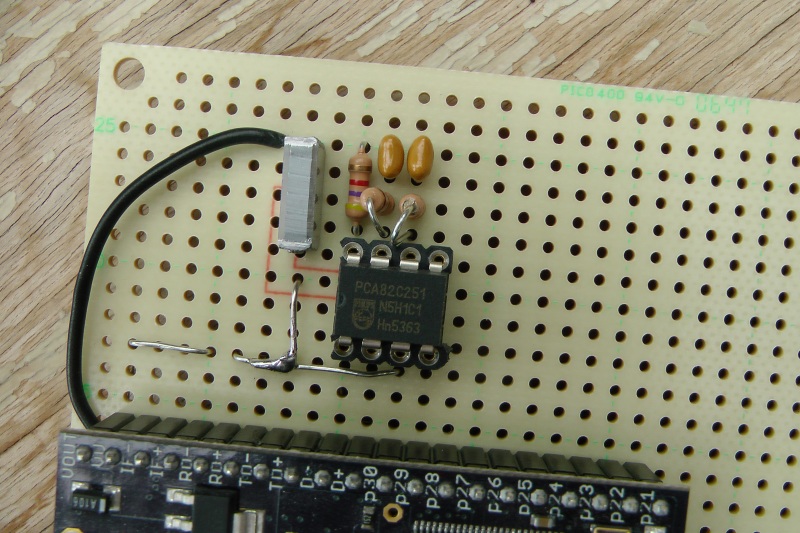
plateforme retenue: mbed, accompagné d'un transceiver mcp2551 et d'un module BT.
je me lance dans un nouveau projet basé sur Arduino & STN1110.
j'ai déja un arduino qui traine à la maison,(et je sais bricoler dessus)
j'ai contacté un gars qui a développé un shield stn1110
mon idée est de solliciter, collecter et traiter localement les données pour envoyer uniquement la synthèse en BT (cette idée me trotte dans la tête depuis un moment et rejoint la remarque de planétaire afin de bypasser les limites du BT).
intérêt du système: meilleur débit, utilisable toutes plateformes...
@suivre
edit: changement de fusil d'épaule.
plateforme retenue: mbed, accompagné d'un transceiver mcp2551 et d'un module BT.
Dernière modification par un modérateur: