Impossible avec obdlink (stn1110)
dès que l'on passe en mode requête, le mode passif est neutralisé.
il y a bien un gugusse (2009Prius sur priuschat) qui tente de bidouiller mais qui plante invariablement son interface, d'ailleurs, il va dès que possible s'équiper comme moi.
le tactrix est mieux pour cela,
et mon machin est parfait du fait de:
du fait de:
a) pouvoir filtrer en amont.
b) s'occuper tout seul du lancement des requêtes
c) de la gestion (trame de relance) et de la consolidation des multitrames.
blague à part, on vient de procéder à un test avec thierryb et nous avons constaté que l'explication du 520 dans le document de kinetik est à revoir quant à sa fréquence. *
par contre, les (zotres) trames passives supervisées étaient bien dans la fourchette prévue.
la gestion des requêtes marche également comme prévue,
et une requête mal formée du type 7E0 21C4 au lieu de 7E2 21C4 ne plante ni la watture ni l'interface....
relevé fréquences:[table="head;width=60%"]|
|||||||||||||||||||
Total|
FPS|
[/table]
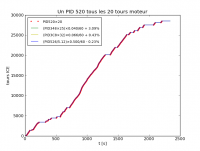
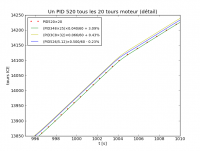
* edit à propos du 520, ben non, 😳 c'est normal: pour effectuer 20 tours moteur, cela prend du temps...
dès que l'on passe en mode requête, le mode passif est neutralisé.
il y a bien un gugusse (2009Prius sur priuschat) qui tente de bidouiller mais qui plante invariablement son interface, d'ailleurs, il va dès que possible s'équiper comme moi.
le tactrix est mieux pour cela,
et mon machin est parfait
a) pouvoir filtrer en amont.
b) s'occuper tout seul du lancement des requêtes
c) de la gestion (trame de relance) et de la consolidation des multitrames.
blague à part, on vient de procéder à un test avec thierryb et nous avons constaté que l'explication du 520 dans le document de kinetik est à revoir quant à sa fréquence. *
par contre, les (zotres) trames passives supervisées étaient bien dans la fourchette prévue.
la gestion des requêtes marche également comme prévue,
et une requête mal formée du type 7E0 21C4 au lieu de 7E2 21C4 ne plante ni la watture ni l'interface....
relevé fréquences:[table="head;width=60%"]|
025
|030
|038
|039
|03A
|0B4
|230
|244
|348
|3C8
|3CB
|3CF
|520
|526
|540
|5A4
|7EA
|Total
||||||||||||||||||||
Total|
6672
|13649
|9949
|9744
|9663
|5254
|2460
|3023
|1836
|1180
|772
|608
|53
|159
|81
|25
|192
|65320
|FPS|
80,4
|164,4
|119,9
|117,4
|116,4
|63,3
|29,6
|36,4
|22,1
|14,2
|9,3
|7,3
|0,6
|1,9
|1,0
|0,3
|2,3
||[/table]
* edit à propos du 520, ben non, 😳 c'est normal: pour effectuer 20 tours moteur, cela prend du temps...
Dernière édition:
 (tm)
(tm)