thierryb
Participant hyperactif
- Inscrit
- 20 Janv. 2011
- messages
- 1,968
- Score de réaction
- 1,032
- Localisation
- Yvelines
- Véhicule
- Prius 2 sol pack ipa 2008 verte
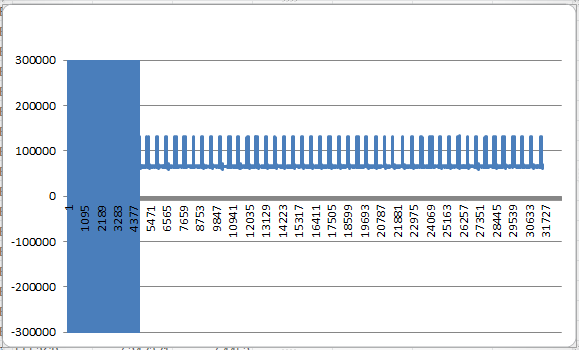
Avec ma trame 520 modifiée, j'ai une partie de la réponse.
Après le 520, les 4 octets suivant représentent le volume consommé, les 8 octets suivants la somme (faite coté MBED) des volumes consommés, les 6 octets suivants le time stamp en microseconde au moment de la lecture du CAN par le MBED.
On peut voir que la somme est juste, trame après trame, donc ce n'est pas le Pc qui duplique les trames, mais elles sont comme dupliquées dans le buffer, pour qu'au moment où on lit le buffer pour envoyer au Pc elles sont en double (par exemple la stampée 11b066).
On peut aussi voir que quand il y en a une en double, parfois elle remplace une trame manquante en se basant sur le temps entre deux trames, qui est de l'ordre de 0,8 à 1 seconde, temps entre 20 tours de moteur, à environ 1200 tours minute. Ainsi la 11b066 est en double, mais elle est en trop et ne remplace aucune manquante, car il y a le "bon" temps entre 050711, 11b066 et 1ebfe0. Par contre, la 2c24fe est en double et semble remplacer une trame manquante. Et sans qu'il y ait doublon, il manque une trame avant la 71b2a6.
Bref des trames en plus, d'autres en moins, d'autres remplacées, pas étonnant que mon volume consommé soit faux par rapport à l'odb. Mais le plus remarquable, c'est que ces problèmes semblent peu affecter le calcul du volume par la méthode PCM (intégration en utilisant le pid 520 et le pid3C8 lui aussi chahuté).
520 04a2 000004a2 e050e6
520 036a 0000080c ec7964
520 03b6 00000bc2 f8b678
520 0381 00000f43 050711
520 0308 0000124b 11b066
520 0308 00001553 11b066
520 0320 00001873 1ebfe0
520 035d 00001bd0 2c24fe
520 035d 00001f2d 2c24fe
520 03c3 000022f0 479d07
520 03bf 000026af 559d99
520 03d4 00002a83 71b2a6
520 03f1 00002e74 7fb74a
520 01ef 00003063 8f38ad
520 01ef 00003252 8f38ad
520 0189 000033db 9fcd2e
520 0195 00003570 afe83c
520 0196 00003706 bf59ca
520 018f 00003895 ce5e5e
520 01be 00003a53 dccfa2
520 025a 00003cad ea6b7f
520 02aa 00003f57 f7fc09
520 02cb 00004222 05b88e
520 02e2 00004504 138525
520 02e8 000047ec 2179a6
520 02f6 00004ae2 2f8a36
520 02c7 00004da9 3daac7
520 0139 00004ee2 4de600
520 0139 0000501b 4de600
520 0000 0000501b 6f9fc1
Autre fait remarquable, ce cahot semble s'arrêter au bout de quelques minutes (2-3 ) pour un trajet d'une vingtaine de minute. C'est d'ailleurs ce que j'avais constaté concernant la conso odb qui ne continuait pas à diverger comme elle le faisait au début du trajet, mais semblait devenir conforme.
Je vais regarder si le cahot s'arrête aussi coté pid3C8
Après le 520, les 4 octets suivant représentent le volume consommé, les 8 octets suivants la somme (faite coté MBED) des volumes consommés, les 6 octets suivants le time stamp en microseconde au moment de la lecture du CAN par le MBED.
On peut voir que la somme est juste, trame après trame, donc ce n'est pas le Pc qui duplique les trames, mais elles sont comme dupliquées dans le buffer, pour qu'au moment où on lit le buffer pour envoyer au Pc elles sont en double (par exemple la stampée 11b066).
On peut aussi voir que quand il y en a une en double, parfois elle remplace une trame manquante en se basant sur le temps entre deux trames, qui est de l'ordre de 0,8 à 1 seconde, temps entre 20 tours de moteur, à environ 1200 tours minute. Ainsi la 11b066 est en double, mais elle est en trop et ne remplace aucune manquante, car il y a le "bon" temps entre 050711, 11b066 et 1ebfe0. Par contre, la 2c24fe est en double et semble remplacer une trame manquante. Et sans qu'il y ait doublon, il manque une trame avant la 71b2a6.
Bref des trames en plus, d'autres en moins, d'autres remplacées, pas étonnant que mon volume consommé soit faux par rapport à l'odb. Mais le plus remarquable, c'est que ces problèmes semblent peu affecter le calcul du volume par la méthode PCM (intégration en utilisant le pid 520 et le pid3C8 lui aussi chahuté).
520 04a2 000004a2 e050e6
520 036a 0000080c ec7964
520 03b6 00000bc2 f8b678
520 0381 00000f43 050711
520 0308 0000124b 11b066
520 0308 00001553 11b066
520 0320 00001873 1ebfe0
520 035d 00001bd0 2c24fe
520 035d 00001f2d 2c24fe
520 03c3 000022f0 479d07
520 03bf 000026af 559d99
520 03d4 00002a83 71b2a6
520 03f1 00002e74 7fb74a
520 01ef 00003063 8f38ad
520 01ef 00003252 8f38ad
520 0189 000033db 9fcd2e
520 0195 00003570 afe83c
520 0196 00003706 bf59ca
520 018f 00003895 ce5e5e
520 01be 00003a53 dccfa2
520 025a 00003cad ea6b7f
520 02aa 00003f57 f7fc09
520 02cb 00004222 05b88e
520 02e2 00004504 138525
520 02e8 000047ec 2179a6
520 02f6 00004ae2 2f8a36
520 02c7 00004da9 3daac7
520 0139 00004ee2 4de600
520 0139 0000501b 4de600
520 0000 0000501b 6f9fc1
Autre fait remarquable, ce cahot semble s'arrêter au bout de quelques minutes (2-3 ) pour un trajet d'une vingtaine de minute. C'est d'ailleurs ce que j'avais constaté concernant la conso odb qui ne continuait pas à diverger comme elle le faisait au début du trajet, mais semblait devenir conforme.
Je vais regarder si le cahot s'arrête aussi coté pid3C8