Excellente mesure, thierryb. Elle est du même type que celle que j'avais faite le 10 juillet : relever des points à partir de 0 L/100km pour voir s'il y a 0,05 L de décalage à cause du type d'arrondi. Je n'avais pas osé consommer par à-coups, pas très certain de la mesure dans ces conditions, et j'avais réalisé une consommation faible constante après une bonne distance sans consommer. Ta démonstration permet de convaincre définitivement les incrédules, qui confondaient une sous-estimation de l'ODB avec un arrondi par défaut.
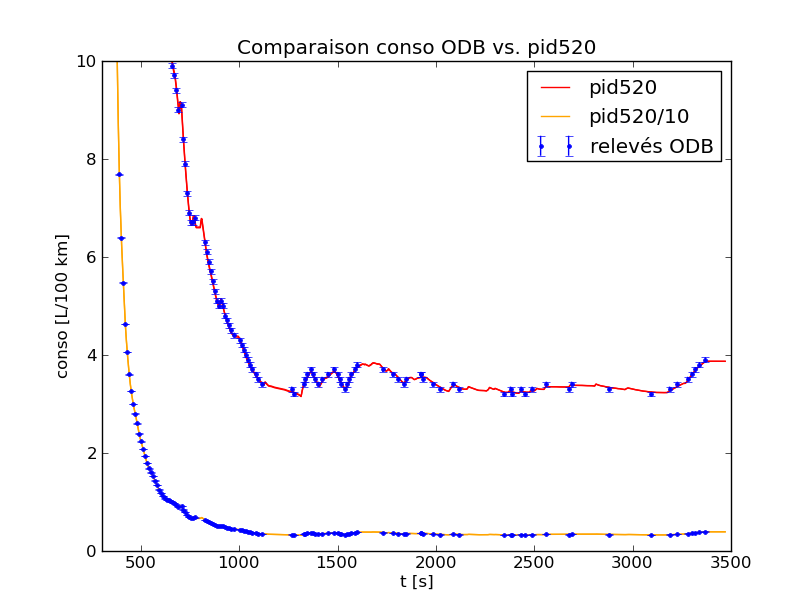
Ma mesure du 31 juillet visait à démontrer que l'ODB mesurait la consommation en sommant bêtement les pid520 sans faire toutes les complications souvent décrites et utilisées dans PCM. Évidemment, pour mesurer une consommation, il faut diviser par une distance. Je ne sais pas avec certitude quelle distance choisit l'ODB. Dans l'hypothèse où il prend le pid230 avec un coefficient de 10,1102 mm, j'obtiens un volume du pid520, considéré par l'ODB égal à 895 µL.
Pour avoir une superposition des consos entre calculé par PCM et par ta méthode, je dois multiplier par 0,930.
Comme l'ODB ment de 3% environ, il est tout à fait honnête de considérer que 930 µL est une meilleure valeur pour atteindre la consommation véritable.
Concernant la distance mesurée par PCM et l'odomètre, l'erreur est inférieure à 1 pour 1000. Par contre l'écart avec ta méthode est de 8 pour 1000, et de 6 pour 1000 avec le gps. Il semble que le calcul gps est à 1 pour 1000 des bornes kilométriques sur autoroute.
Là encore, il faut distinguer le problème de la mesure de la distance véritable et le problème de faire la même mesure que l'ODB. Dans tous les cas, on ne mesure que des tours de roue. Il faut faire des hypothèses sur la circonférence. La Prius en fait plusieurs, et change même de valeur en cours de route ! J'ai cru un moment que le pid230 comptait strictement la rotation des roues arrière, sans coefficient variable, mais il me semble que lorsquon freine, il y a une correction.
Sur une longue distance, 250 Kilomètres, j'ai eu les changements de valeurs à l'odb plutôt comme une troncature que comme un arrondi.
Il faut faire les mesures sur des consommations proches de 0 pour distinguer un coefficient faux d'un problème arrondi. Maintenant je sais que tu as changé d'avis :
arrondi au plus proche !
Est-ce que tous les points que tu nous donnes ont été relevés à la main ?
Je les ai enregistrés au dictaphone. Je n'étais pas obligé de regarder sans cesse l'ODB et le chronomètre, parce que lorsque l'ODB n'est pas au repos , il change très précisément toutes les dix secondes.
Peux-tu le faire sur des consommations plus importantes et des distances plus longues ?
Il me reste à faire moi même des relevés à la main.
Je suis en train de modifier mon PCM pour le faire fonctionner avec le MBED, je compte passer à ta façon de calculer les microlitres consommés, et les distances. Le problème va être de calibrer correctement les deux valeurs.
pour l'instant, je partirais sur 0,930 pour le pid 520, et 10,08 pour le pid 320 (les 8 pour 1000 qui manquent)
Pour obtenir des valeurs plus exactes que l'ODB c'est très bien. Le 10,08 dépend des pneus.
comment calcules-tu les tours moteur pour vérifier qu'il ne manque pas dans le calcul un pid 520 de temps en temps?
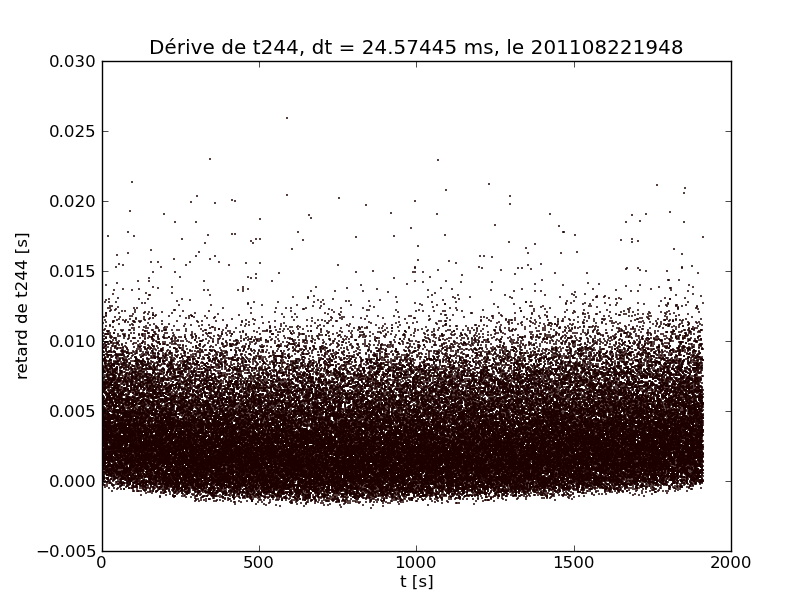
Il y 3 autres PID passifs qui donnent la vitesse moteur. La vitesse intégrée sur le temps donne un nombre de tours qui peut être interpolé. La différence du nombre de tours entre deux apparitions du pid520 doit être proche de 20. Si tu trouves 43, c'est que tu as loupé une valeur ; 56 deux valeurs.
En faisant cette comparaison dans le détail, je me suis rendu compte récemment que les tours moteurs avant son arrêt et après une sortie du pid520 sont bien conservés pour le prochain pid520. Donc dans les situations d'arrêt-demarrage, sommer bêtement le pid est très supérieur aux calculs compliqués (bien sûr, statistiquement, ça ne doit pas diverger beaucoup).
Pour le MBED intégrer et interpoler est peut-être coûteux. Comme les PID tours moteurs arrivent à intervalles très réguliers, il suffit de les sommer, mais en vérifiant pour le coup leur régularité.
Incidemment, c'est cette régularité qui m'a permis d'identifier systématiquement les ECU sources des PID : les intervalles évoluent légèrement dans le temps, probablement à cause de la température et de la tension batterie ; comme l'évolution est différente pour les différents ECU, on peut classer aisément les PID Cf.
http://xomti.com/CAN_NHW20.html (pas très à jour)