ça y est ! Le joujou est arrivé (péniblement, Chronopost semble avoir du mal à parcourir les derniers mètres...)
ça fonctionne avec Fuzzycar sur iPhone. Avec Rev2, rien du tout.
Mais ce n'est pas mon iPhone (1ère génération) qui me permettra un suivi en temps réel des paramètres : ça rame sévèrement...
Prochaines étapes : essai avec iPad, puis MacBook dès que j'aurai eu un peu de temps pour programmer.
A suivre.
Suite des expériences !
Fuzzycar était trop limité, je suis passé à Dashcommand, malgré le prix excessif (40€). J'ai hésité entre Rev2 (Rev2 Lite finalement fonctionnait aussi sur iPhone avec l'OBD-link) et Dashcommand, mais à quelques euros près le prix était le même et ce dernier me semblait plus complet.
Dashcommand est plus efficace que Fuzzycar, mais sur iPhone 1ère génération, ça rame quand même... et par ailleurs ma liaison WiFi se déconnectait sans arrêt. Impossible d'enregistrer quoi que ce soit de manière fiable, donc je suis passé à l'iPad malgré son encombrement. Pourquoi l'iPad ne se déconnecte pas ? Mystère. Peut être que mon iPhone est un peu trop vieux. Pour un bon compromis rapidité/encombrement, je pense qu'un iPhone 4 serait l'idéal.
Limites de Dashcommand : les fichiers logs sont dans un format spécifique. Il faut télécharger PCMSCAN sur le site de
palmerperformance. La version d'évaluation, gratuite, suffit pour convertir les logs au format CSV.
Problème : PCMSCAN ne tourne "que" sur Windows.
Solution : PCMCAN tourne très bien sur
CrossOver Mac, du moins pour la lecture des logs et les conversions log -> CSV. Donc, pas besoin de Windows ! (il faut tout de même débourser 37 € passés 30 jours...)
Autre limite de Dashcommand : pour exporter un fichier log, il faut l'envoyer par courriel. J'en ai un de 4,9 Mo qui ne veut pas partir (ce n'est pas lié à la capacité de ma messagerie). Il n'y a pas d'autre solution pour le récupérer, donc j'ai 40 mn d'enregistrement qui sont inexploitables.
Conclusion : dorénavant j'arrêterai et relancerait l'enregistrement toutes les 30 mn environ (ça fait à peu près 4 Mo d'enregistrement).
Enfin, la plus grave limitation de Dashcommand c'est de n'avoir pas accès aux codes spécifiques Prius, notamment tout ce qui concerne la batterie et les MG1 et MG2.
Tout cela est un peu compliqué, je travaille donc toujours sur une application spécifique Mac, pour faire de l'enregistrement "en masse" et surtout avoir accès à tous les codes.
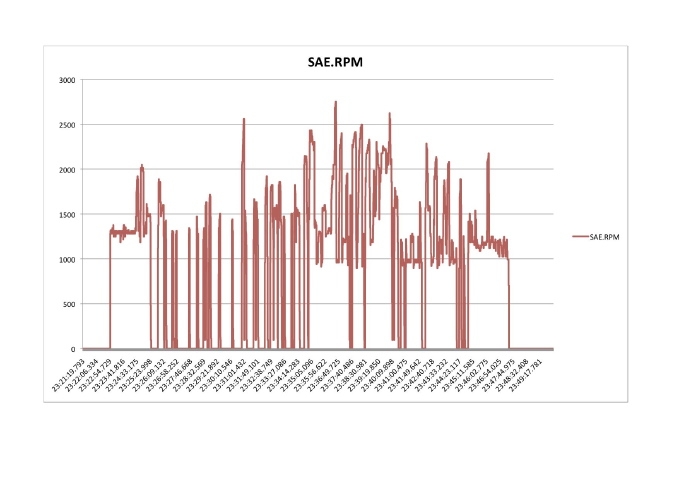
En attendant, voici un enregistrement du régime moteur sur mon dernier trajet :
")