HELLO
😉 Guinness

nice to "see" you again & thx for your very helpfull remarks
*...
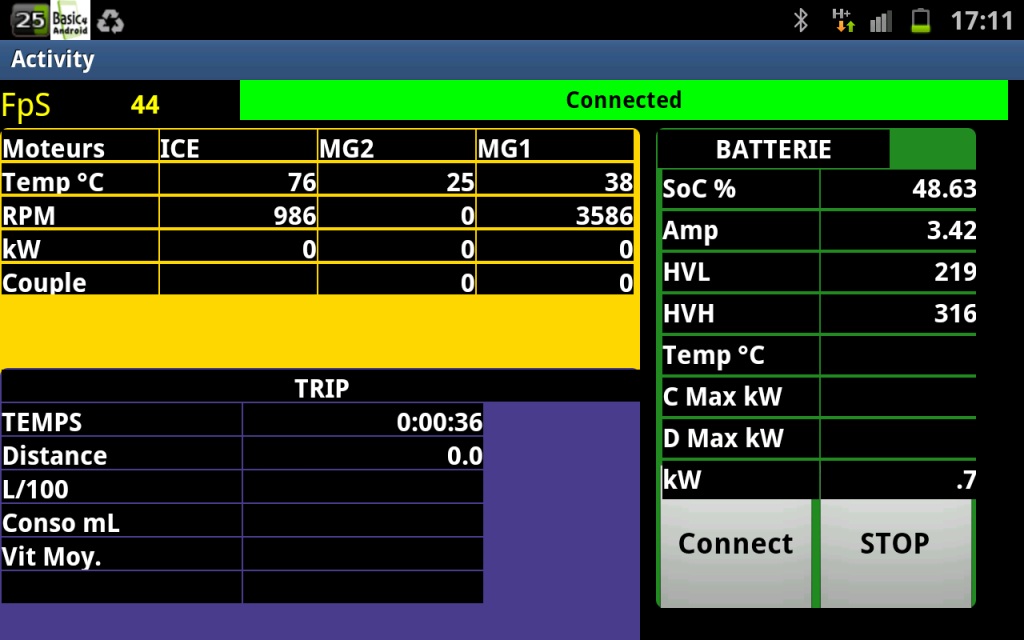
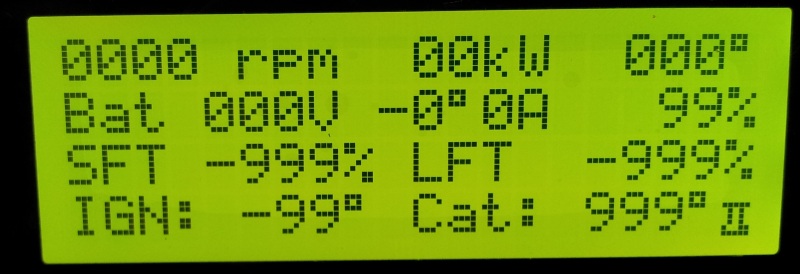
here is a preliminary result on a galaxy note:
to make it short: with this kind of interface:
- we can ask for more than 100 request/seq.
- we can use selective passive frames.
- using BT, the result is easy to use for any kind of platform.
- it is possible (to be checked) to log on SDCard.
on a gen3, regarding ICE, MG2 & MG1 we get around 11.5
FULL info/sec
as you can see, it will be much easier than using an elm327 or stn1110, there is no latency, and the data are already pre-formatted.
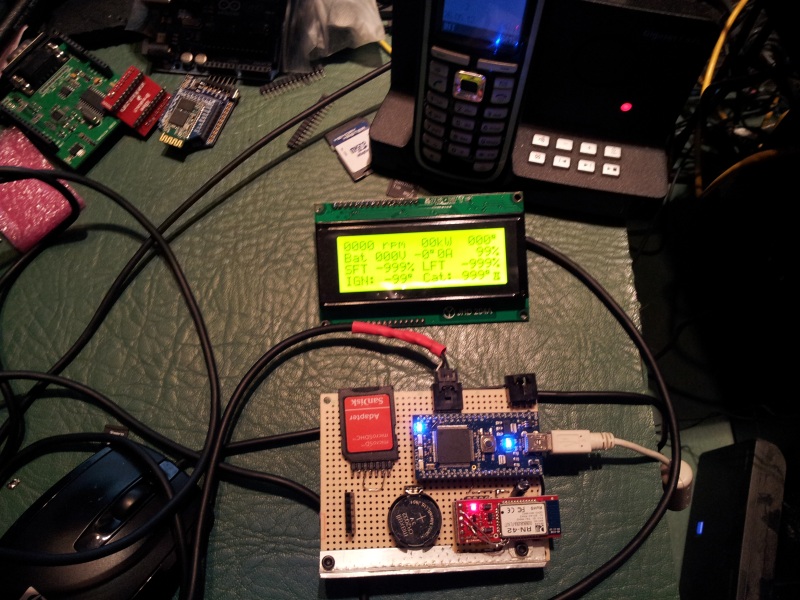
regarding BT: the interface is "broadcasting", without waiting for a "listener" :
I start the car, I start my app on android (or whatever OS) and I get the messages...
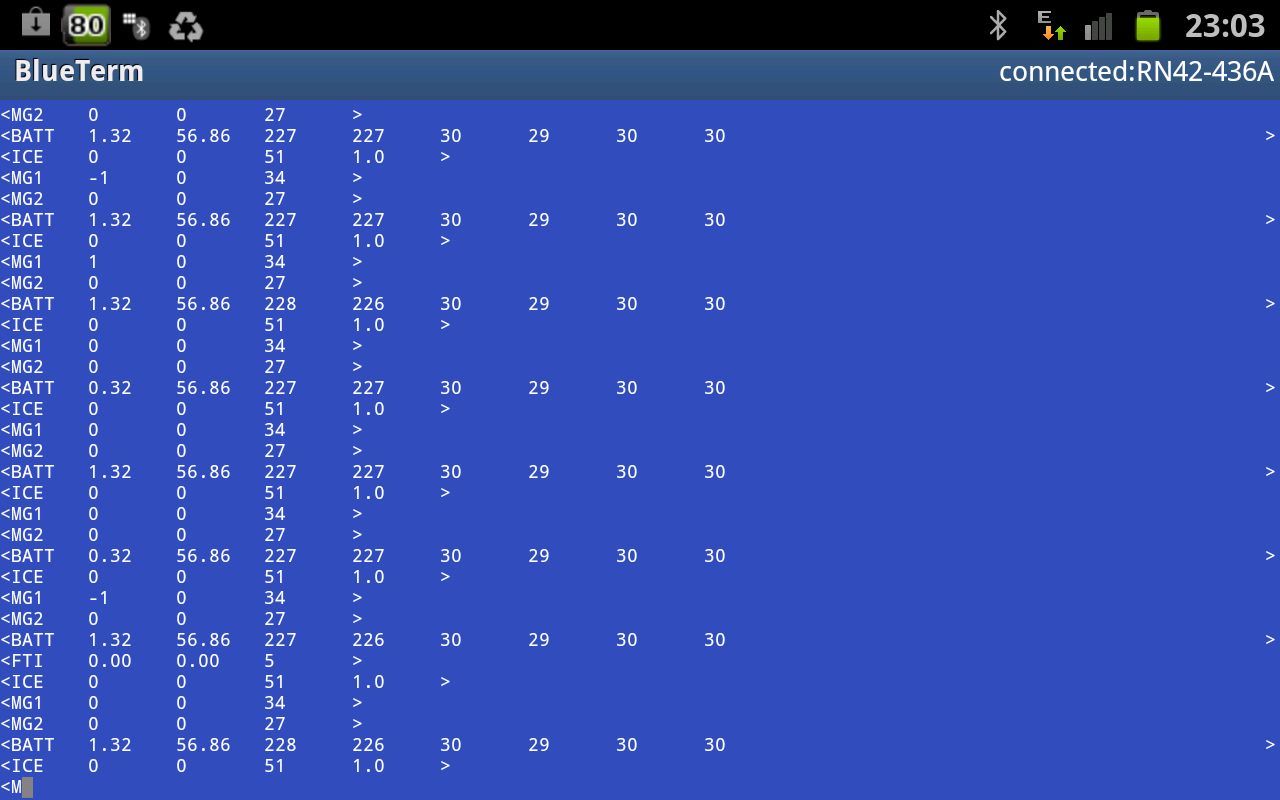
and
here is a log of what we get by USB (at the same time); the timestamp comes from realterm.
the car was not moving very fast in my garage

, so I will do some more tests tomorrow.
* you wrote

you had no practice with C++ since 10 years
I write : I never practised C/C++ before this "thing", but knowledgeable
people were there to correct my mistakes...

ps: the main trouble I had
I was feeding BS in the requests
PID=7E2 freq=001 Code= 03 21 8a 74 00 00 00 00
PID=7E0 freq=010 Code= 04 01 06 07 0e
PID=7E2 freq=200 Code= 02 21 01 00 00 00 00 00
the line in the middle was not complete....
😳