I had a dream
… mais j’ai oublié d’en parler au Père Noël …
Peut-être que vous pourrez m’aider ?
Nous aider ! Car j’en connais au moins un qui a ce même rêve. N’est-ce pas palm ?
De quoi s’agit-t-il donc ?
De TripMaster voyons.
Comme d’hab.
Bon, j’explique. Je me suis regardé de très très près toutes les logs et les vidéos que j’ai enregistrées dans les Zones de Régularité des Monte Carl’ qu’on a fait. On s’est drôlement amélioré grâce à l’outil dont nous disposons mais je pense qu’on peut faire encore mieux.
J’aimerais bien faire mieux cette fois-ci car vu l’inflation (pécuniaire) qui a touché ce Rallye il n’est pas sur qu’on va y revenir en 2014 où ils pensent faire faire 14 ZR (pour 8 cette année et 6 les précédentes). Si l’augmentation de frais d’inscription est proportionnelle au nombre des ZR (+30% pour 2 ZR en plus, donc ??% pour 6 supplémentaires) …
La première chose qui me parait hyper importante c’est d’enlever tous les traitements qui ne nous servent pas en ZR. En gros la seule chose qui me sert en ZR c’est le calcul de la distance et de l’écart par rapport à la moyenne imposée. La conso le régime moteur le SOC etc j’ai pas le temps de m’en occuper. Quand on sait qu’en 2012 1 litre d’essence valait 20 secondes de pénalité en ZR ma priorité va clairement aux secondes de pénalité. En sortie d’épingle où on perd minimum 2 secondes par rapport à la moyenne à tenir je ne cherche pas l’accélération la plus efficiente énergétiquement mais celle qui me ramènera le plus vite à l’écart 0 par rapport à la moyenne imposée. Le visionnage des vidéos m’a permis de trouver les endroits où ils nous chronométraient. Ben justement, très souvent peu après la sortie d’une épingle.
L’actuelle fonction TripMaster a été greffée pardessus les fonctions du PCM qui font tout un tas de calculs gourmands en temps et ressources, dès lors pas étonnant que le calcul et rafraichissement des données pour le TripMaster ne se fasse pas à la meilleure cadence.
L’affichage du retard/avance en secondes se fait avec la précision d’une seconde. Ce qu’il faudrait c’est la précision de 0,1 sec. Pour pas compliquer les choses on a donc demandé l’affichage des mètres car à 50 km/h on parcoure env 13,8 m / sec donc 1 mètre d’écart équivaut grosso modo à 0,1 sec. Le problème, et on le voit bien dans les logs, c’est que le calcul de la distance n’étant pas une priorité on peut avoir d’énormes sauts spacio-temporels du style : en une seconde on passe de 30m d’avance à 10m voire 0. Cela voudrait dire qu’en roulant à 50 km/h on s’est arrêté net (bonjour les G ….) voire reculé dans le temps (là c’est Einstein qui serait content).
J’ai fait la comparaison de la distance enregistrée dans les log avec la distance recalculée à partir de la vitesse instantanée enregistrée dans ces mêmes logs. Dist = Dist-1 + ((V + V-1)/2/3,6) * (timestamp – timestamp-1). Comme l’interval entre 2 timestamps est d’env 1/9e de seconde j’ai considéré ces accélérations comme constantes.
Eh bien, sur la longueur d’une ZR y a pas d’écart ! Enfin, y a des écarts minimes entre les 2 dus au fait que la courbe de la vitesse moyenne obtenue d’après la vitesse instantanée est bien moins saccadée.
Donc ce qui me plairait bien c’est de ‘shunter’ tout ce qui ne nous sert pas et ne ramasser que des PID simples :
- la vitesse instantanée (je pense que ça peut être exact - à vérifier toutefois si ça décale pas à de petites vitesses comme ce qu’on a vu entre 2 PID de distance - j’ai même cru ouïr quelque part que les PID de distance donnés par la Prius seraient issus … de la vitesse instantanée).
- les 2 PID de distance si possible (pas sur qu’on s’en serve mais pour faire les étalonnages)
- mettre le paquet sur le rafraichissement
- modifier l’affichage (très important aussi).
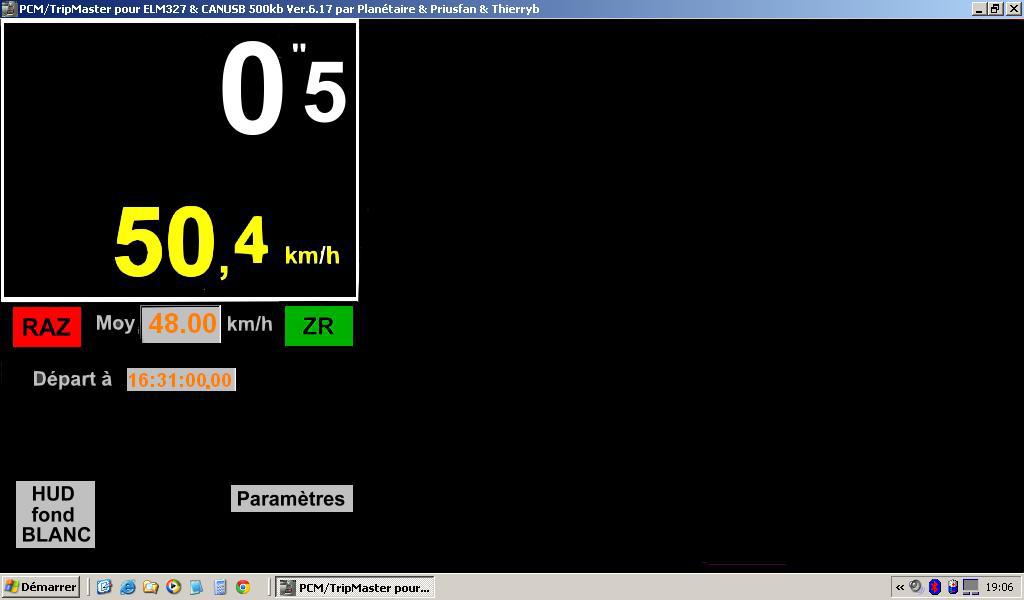
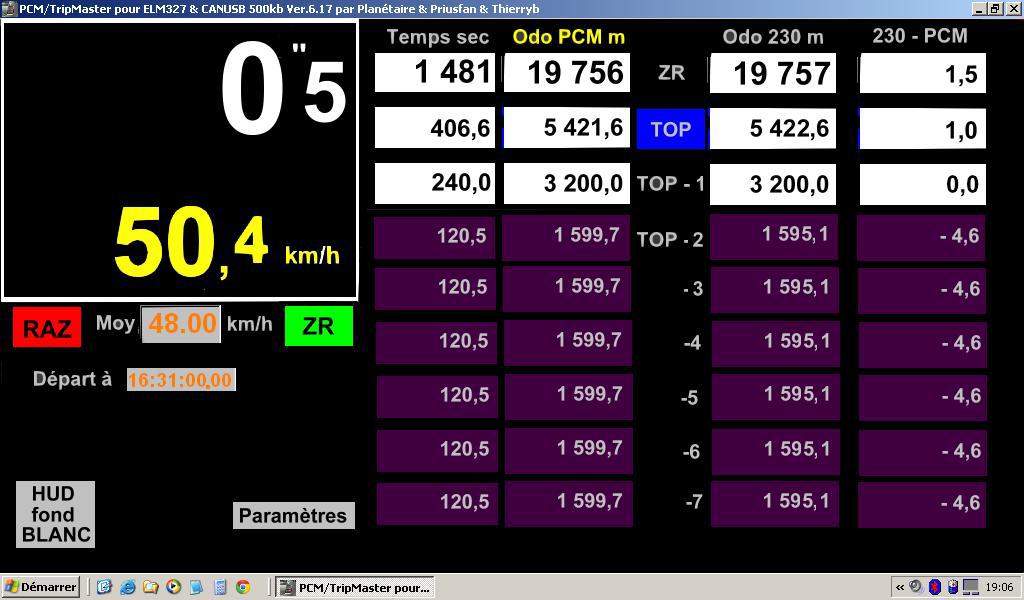
Ci après proto du nouvel écran d’affichage.
La chose importante c’est la zone d’affichage agrandie dans le coin gauche supérieur (le reste est à retravailler, je le ferai bientôt). L’idée est d’en faire un HUD. En utilisant un convertisseur VGA/Vidéo composite j’arrive à afficher cette zone en plein écran sur un petit écran de 2,5 pouces que je place au pied du pare brise (j’ai vu sur Amazon à de prix bas des moniteurs d’autres tailles : 3.5 , 4.2 etc. à voir le meilleur)
Je pense que l’affichage d’écart seulement en secondes sera suffisant (avec différenciation nette de l’avance du retard ; à peaufiner : couleur, taille etc). Avec la précision de 1/10 et un affichage fluide l’affichage des mètres me parait superflu. Bien sur à vérifier.
Plus bas, à la place des mètres, j’ai mis l’affichage de la vrai vitesse instantanée, ce qui éviterait de zyeuter sur le compteur de la Prius puis appliquer des conversions mentales.
A peaufiner aussi de fois que ça rende la lecture de l’écart confuse où qu’on ait pas assez de place pour les 2.
Dites moi si vous pouvez nous aider dans ce projet ?
Etape 1) nettoyage du PCM ou nouvelle interface fournissant juste les données dont on a besoin à la cadence la plus élevée possible
Etape 2) nouvel afficheur
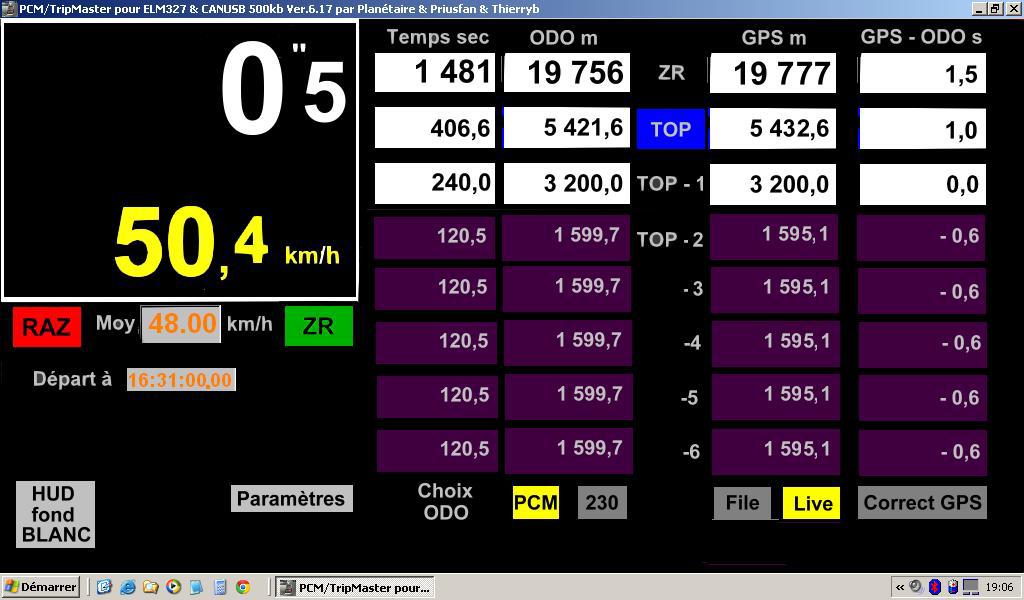
Etape 3) … eh, là … j’ai l’idée d’un outil de rééquilibrage basé sur la lecture de la position GPS courante et sa comparaison par rapport aux coordonnées GPS choppées sur une cartographie Google ou autre ou bien enregistrées avec un récepteur GPS lors des reconnaissances …
Mais là c’est une autre paire des manches et je ne crois pas qu’on puisse le faire à temps. Mais je vais vous en parler plus tard.
Et voilà, le zoli zécran …